La SDTlib repose sur le formalisme TITOP (Two-Input Two-Output Port). Le modèle TITOP d’un corps flexible (un panneau solaire par exemple) décrit sa dynamique de façon indépendante du reste du système. En assemblant des modèles TITOP, on peut donc construire le modèle d’une structure complexe tout en gardant des paramètres physiques pour chaque sous-structure.
La figure suivante représente une structure flexible quelconque notée L_i, connectée à une structure parent L_(i-1) au point P, et à une structure enfant L_(i+1) au point C.
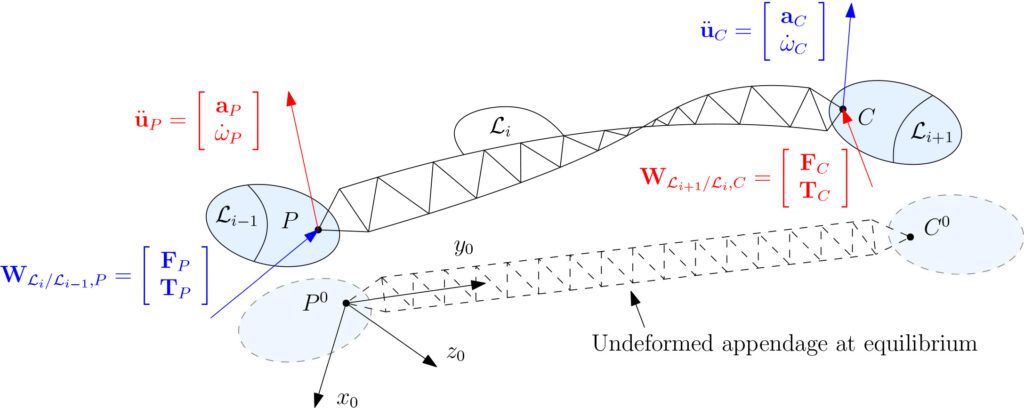
Le modèle TITOP de cette structure est le transfert 12×12 entre les entrées (en rouge) :
W_(L_(i+1)/L_i,P) le torseur contenant la force et le couple appliqué par L_(i+1) sur L_i au point C,
- W_(L_(i+1)/L_i,P) le torseur contenant la force et le couple appliqué par L_(i+1) sur L_i au point C,
- u ̈_P les accélérations (translation et rotations) imposées à L_i au point P,
Et les sorties (en bleu) :
- u ̈_C les accélérations résultantes au point C (avec les composantes rigides et flexibles),
- W_(L_i/L_(i-1),P) le torseur appliqué par L_i à L_(i-1) en réaction au point P.
Ici, le corps flexible est donc encastré en P – libre en C ; mais la SDTlib effectue les opérations d’inversion nécessaires pour obtenir toutes conditions au limites (et pour tout nombre de points de connexion).
Le modèle TITOP est construit à partir des données mécaniques de la structure. Dans la SDTlib, des modèles analytiques sont implémentés pour des formes simples (plaques et poutres), ainsi que des modèles à éléments finis pour des assemblages de plaques ; pour des structures plus complexes, il est également possible de renseigner directement les fréquences de résonance et les facteurs de participation modales, obtenus par tout autre software externe, ou bien de rentrer directement le fichier f06 fourni par Nastran.
Le modèle TITOP peut ensuite être connecté à la structure, aussi bien pour des configurations simples (comme un panneau solaire encastré au corps central en un point) que complexes (chaînes cinématique ouverte représentant un bras robotique, assemblage de plaques en chaîne cinématique fermée pour modéliser un panneau solaire…). Il est compatible avec la représentation des incertitudes sous forme LFT (Linear Fractional Transformation) afin de produire un modèle entièrement paramétré.